Teleoperação arriscada, simulação de Rocket League e multiplicação de zoólogos – TechCrunch
[ad_1]
A pesquisa no campo de aprendizado de máquina e IA, agora uma tecnologia-chave em praticamente todos os setores e empresas, é volumosa demais para que qualquer um leia tudo. Esta coluna, Perceptron (anteriormente Ciência Profunda), visa coletar algumas das descobertas e artigos recentes mais relevantes — particularmente, mas não limitado a, inteligência synthetic — e explicar por que eles são importantes.
Esta semana em IA, pesquisadores descoberto um método que pode permitir que os adversários rastreiem os movimentos de robôs controlados remotamente, mesmo quando as comunicações dos robôs são criptografadas de ponta a ponta. Os coautores, da Universidade de Strathclyde, em Glasgow, disseram que seu estudo mostra que adotar as melhores práticas de segurança cibernética não é suficiente para impedir ataques a sistemas autônomos.
O controle remoto, ou teleoperação, promete permitir que os operadores guiem um ou vários robôs de longe em uma variedade de ambientes. Startups incluindo Robótica de pólen, Feixee Tartaruga demonstraram a utilidade de robôs teleoperados em supermercados, hospitais e escritórios. Outras empresas desenvolvem robôs controlados remotamente para tarefas como eliminação de bombas ou levantamento de locais com radiação pesada.
Mas a nova pesquisa mostra que a teleoperação, mesmo quando supostamente “segura”, é arriscada em sua suscetibilidade à vigilância. Os coautores de Strathclyde descrevem em um artigo usando uma rede neural para inferir informações sobre quais operações um robô controlado remotamente está realizando. Após coletar amostras de TLS-protegido o tráfego entre o robô e o controlador e realizando uma análise, eles descobriram que a rede neural poderia identificar movimentos em cerca de 60% do pace e também reconstruir “fluxos de trabalho de armazenamento” (por exemplo, pegar pacotes) com “alta precisão”.
Créditos da imagem: Shah et ai.
Alarmar de forma menos imediata é uma nova estudar de pesquisadores do Google e da Universidade de Michigan que exploraram as relações das pessoas com sistemas alimentados por IA em países com legislação fraca e “otimismo nacional” para a IA. O trabalho pesquisou usuários “estressados financeiramente” de plataformas de empréstimos instantâneos que têm como alvo os mutuários com crédito determinado pela IA de modelagem de risco. De acordo com os coautores, os usuários experimentaram sentimentos de endividamento pelo “bônus” dos empréstimos instantâneos e a obrigação de aceitar termos severos, compartilhar dados confidenciais em excesso e pagar altas taxas.
Os pesquisadores argumentam que as descobertas ilustram a necessidade de maior “responsabilidade algorítmica”, particularmente no que diz respeito à IA em serviços financeiros. “Argumentamos que a responsabilidade é moldada pelas relações de poder do usuário da plataforma e pedimos cautela aos formuladores de políticas na adoção de uma abordagem puramente técnica para promover a responsabilidade algorítmica”, escreveram eles. “Em vez disso, pedimos intervenções situadas que melhorem a agência dos usuários, possibilitem transparência significativa, reconfigurem as relações designer-usuário e estimulem uma reflexão crítica nos profissionais para uma responsabilidade mais ampla”.
Em menos austero pesquisar, uma equipe de cientistas da TU Dortmund College, Rhine-Waal College e LIACS Universiteit Leiden, na Holanda, desenvolveram um algoritmo que eles afirmam poder “resolver” o jogo Rocket League. Motivado a encontrar uma maneira menos computacionalmente intensiva de criar IA para jogos, a equipe aproveitou o que eles chamam de técnica de transferência “sim-para-sim”, que treinou o sistema de IA para realizar tarefas no jogo, como goleiros e golpes dentro de um versão simplificada e despojada de Rocket League. (Rocket League basicamente se assemelha ao futebol de salão, exceto com carros em vez de jogadores humanos em equipes de três.)
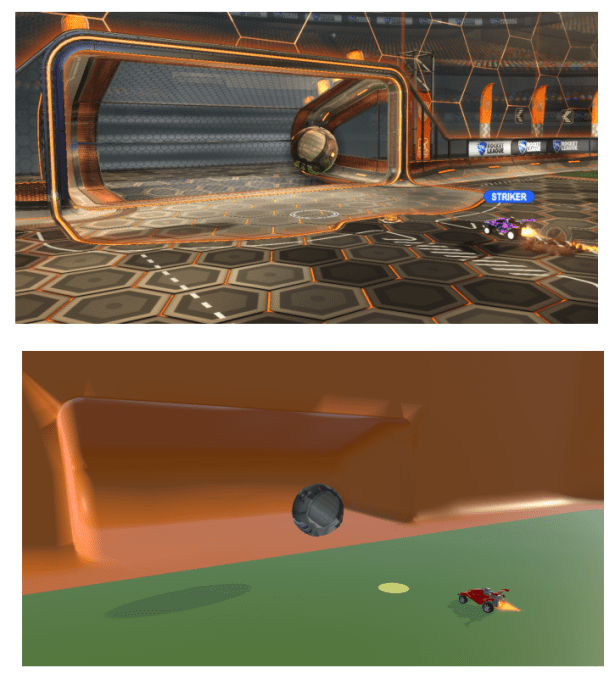
Créditos da imagem: Pleines et ai.
Não foi perfeito, mas o sistema de jogo da Rocket League dos pesquisadores conseguiu salvar quase todos os chutes disparados na direção do goleiro. Quando na ofensiva, o sistema marcou com sucesso 75% dos chutes – um recorde respeitável.
Simuladores de movimentos humanos também estão avançando em ritmo acelerado. O trabalho da Meta no rastreamento e simulação de membros humanos tem aplicações óbvias em seus produtos AR e VR, mas também pode ser usado de forma mais ampla em robótica e IA incorporada. A pesquisa que saiu esta semana teve uma dica do ninguém menos que Mark Zuckerberg.
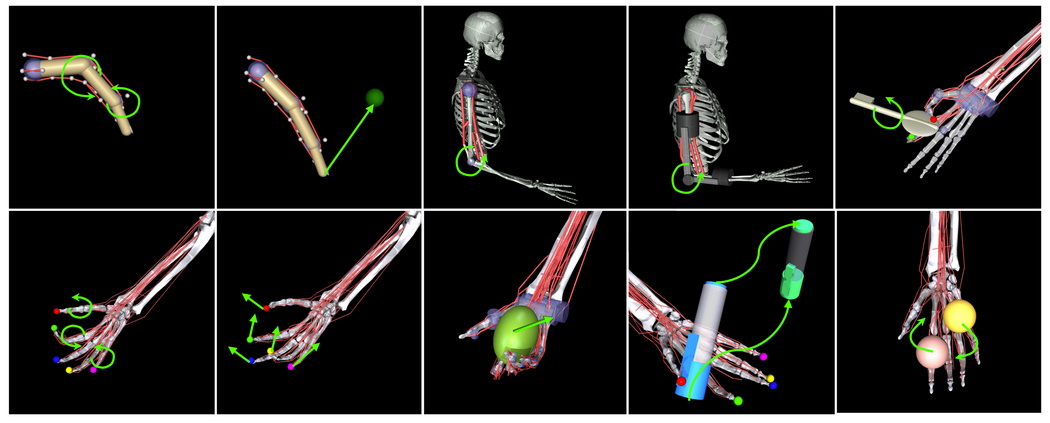
Esqueleto e grupos musculares simulados no Myosuite.
MyoSuite simula músculos e esqueletos em 3-D à medida que eles interagem com objetos e eles mesmos – isso é importante para os agentes aprenderem a segurar e manipular as coisas corretamente sem esmagá-las ou derrubá-las, e também em um mundo digital fornece aderências e interações realistas. Ele supostamente é executado milhares de vezes mais rápido em determinadas tarefas, o que permite que os processos de aprendizado simulados aconteçam muito mais rapidamente. “Vamos abrir o código desses modelos para que os pesquisadores possam usá-los para avançar ainda mais no campo”, diz Zuck. E eles fizeram!
Muitas dessas simulações são baseadas em agentes ou objetos, mas este projeto do MIT analisa a simulação de um sistema geral de agentes independentes: carros autônomos. A ideia é que, se você tiver uma boa quantidade de carros na estrada, poderá fazer com que eles trabalhem juntos não apenas para evitar colisões, mas para evitar paradas desnecessárias nos semáforos.
Se você olhar de perto, apenas os carros da frente realmente param.
Como você pode ver na animação acima, um conjunto de veículos autônomos se comunicando usando protocolos v2v pode basicamente impedir que todos, exceto os carros da frente, parem, diminuindo progressivamente um atrás do outro, mas não tanto que eles realmente parem . Esse tipo de comportamento de hypermiling pode parecer que não economiza muito combustível ou bateria, mas quando você aumenta para milhares ou milhões de carros, faz a diferença – e pode ser um passeio mais confortável também. Boa sorte fazendo com que todos se aproximem do cruzamento perfeitamente espaçados assim.
A Suíça está dando uma boa olhada em si mesma – usando tecnologia de digitalização 3-D. O país está fazendo um mapa enorme usando UAVs equipados com lidar e outras ferramentas, mas há um porém: o movimento do drone (deliberado e acidental) introduz erro no mapa de pontos que precisa ser corrigido manualmente. Não é um problema se você estiver apenas escaneando um único prédio, mas um país inteiro?
Felizmente, uma equipe da EPFL está integrando um modelo de ML diretamente na pilha de captura lidar que pode determinar quando um objeto foi digitalizado várias vezes de diferentes ângulos e usar essas informações para alinhar o mapa de pontos em uma única malha coesa. Esta notícia não é particularmente esclarecedor, mas o papel que o acompanha entra em mais detalhes. Um exemplo do mapa resultante é visível no vídeo acima.
Por fim, em notícias inesperadas, mas altamente agradáveis, de IA, uma equipe da Universidade de Zurique projetou um algoritmo para rastrear o comportamento animal para que os zoólogos não precisem passar semanas de filmagens para encontrar os dois exemplos de danças de namoro. É uma colaboração com o Zoológico de Zurique, que faz sentido quando você considera o seguinte: “Nosso método pode reconhecer mudanças comportamentais sutis ou raras em animais de pesquisa, como sinais de estresse, ansiedade ou desconforto”, disse o chefe do laboratório, Mehmet Fatih Yanik.
Assim, a ferramenta pode ser usada tanto para aprender e rastrear comportamentos em cativeiro, quanto para o bem-estar de animais cativos em zoológicos e também para outras formas de estudos com animais. Eles poderiam usar menos animais sujeitos e obter mais informações em menos pace, com menos trabalho de estudantes de pós-graduação debruçados sobre arquivos de vídeo até tarde da noite. Soa como uma situação ganha-ganha-ganha para mim.
Créditos da imagem: Ella Marushenko / ETH Zurique
Além disso, adorei a ilustração.
[ad_2]
Fonte da Notícia


