[ad_1]
Este artigo é parte de nossa cobertura das últimas novidades em Pesquisa de IA.
A pesquisa em inteligência synthetic fez grandes conquistas na solução de aplicações específicas, mas ainda estamos longe do tipo de sistemas de IA de uso geral que os cientistas sonham há décadas.
Entre as soluções que estão sendo exploradas para superar as barreiras da IA está a ideia de sistemas neuro-simbólicos que reúnem o melhor dos diferentes ramos da ciência da computação. Em um palestra no IBM Neuro-Symbolic AI Workshop, Joshua Tenenbaum, professor de ciência cognitiva computacional no Massachusetts Institute of Generation, explicou como os sistemas neuro-simbólicos podem ajudar a resolver alguns dos principais problemas dos atuais sistemas de IA.
Entre as muitas lacunas na IA, Tenenbaum está focada em uma em explicit: “Como vamos além da ideia de inteligência como reconhecimento de padrões em dados e funções aproximadas e mais em direção à ideia de todas as coisas que a mente humana faz quando você está modelando o mundo, explicando e entendendo as coisas que você está vendo, imaginando coisas que você não pode ver, mas podem acontecer, e transformando-as em metas que você pode alcançar planejando ações e resolvendo problemas?”
É certo que essa é uma grande lacuna, mas colá-la começa com a exploração de um dos aspectos fundamentais da inteligência que humanos e muitos animais compartilham: física intuitiva e psicologia.
Física intuitiva e psicologia
Nossas mentes são construídas não apenas para ver padrões em pixels e ondas sonoras, mas para entender o mundo através de modelos. Como seres humanos, começamos a desenvolver esses modelos aos três meses de idade, observando e agindo no mundo.
Nós dividimos o mundo em objetos e agentes, e interações entre esses objetos e agentes. Os agentes têm seus próprios objetivos e seus próprios modelos de mundo (que podem ser diferentes dos nossos).
Por exemplo, vários estudos pelos pesquisadores Felix Warneken e Michael Tomasello mostram que as crianças desenvolvem ideias abstratas sobre o mundo físico e outras pessoas e as aplicam em novas situações. Por exemplo, no vídeo a seguir, apenas por meio da observação, a criança percebe que a pessoa que segura os objetos tem um objetivo em mente e precisa de ajuda para abrir a porta do armário.
Esses recursos são frequentemente chamados de “física intuitiva” e “psicologia intuitiva” ou “teoria da mente”, e estão no cerne do senso comum.
“Esses sistemas se desenvolvem muito cedo na arquitetura do cérebro que, em certa medida, é compartilhada com outras espécies”, diz Tenenbaum. Esses sistemas cognitivos são a ponte entre todas as outras partes da inteligência, como os alvos da percepção, o substrato do planejamento de ação, o raciocínio e até a linguagem.
Os agentes de IA devem ser capazes de raciocinar e planejar suas ações com base nas representações mentais que desenvolvem do mundo e de outros agentes por meio da física intuitiva e da teoria da mente.
Arquitetura neuro-simbólica
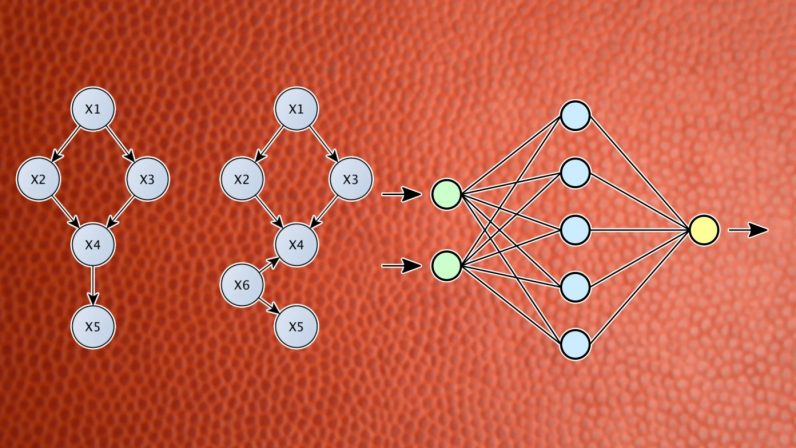
Tenenbaum lista três componentes necessários para criar o núcleo da física intuitiva e da psicologia na IA.
“Enfatizamos uma interação de três vias entre modelagem e inferência neural, simbólica e probabilística”, diz Tenenbaum. “Achamos que é essa combinação de três vias que é necessária para capturar a inteligência humana e o bom senso central.”
O componente simbólico é usado para representar e raciocinar com conhecimento abstrato. O modelo de inferência probabilística ajuda a estabelecer relações causais entre diferentes entidades, raciocinar sobre contrafactuais e cenários invisíveis e lidar com a incerteza. E o componente neural america o reconhecimento de padrões para mapear dados sensoriais do mundo actual para o conhecimento e para ajudar a navegar nos espaços de pesquisa.
“Estamos tentando reunir o poder das linguagens simbólicas para representação e raciocínio do conhecimento, bem como redes neurais e as coisas em que elas são boas, mas também com a ideia de inferência probabilística, especialmente inferência bayesiana ou inferência inversa em um modelo causal para raciocinar de trás para frente das coisas que podemos observar para as coisas que queremos inferir, como a física subjacente do mundo ou os estados mentais dos agentes”, diz Tenenbaum.
O motor de jogo na cabeça
Um dos principais componentes do conceito de IA neurossimbólica de Tenenbaum é um simulador de física que ajuda a prever o resultado das ações. Simuladores de física são bastante comuns em motores de jogos e diferentes ramos de aprendizado por reforço e robótica.
Mas, diferentemente de outros ramos da IA que usam simuladores para treinar agentes e transferir seus aprendizados para o mundo actual, a ideia de Tenenbaum é integrar o simulador ao processo de inferência e raciocínio do agente.
“É por isso que o chamamos de mecanismo de jogo na cabeça”, diz ele.
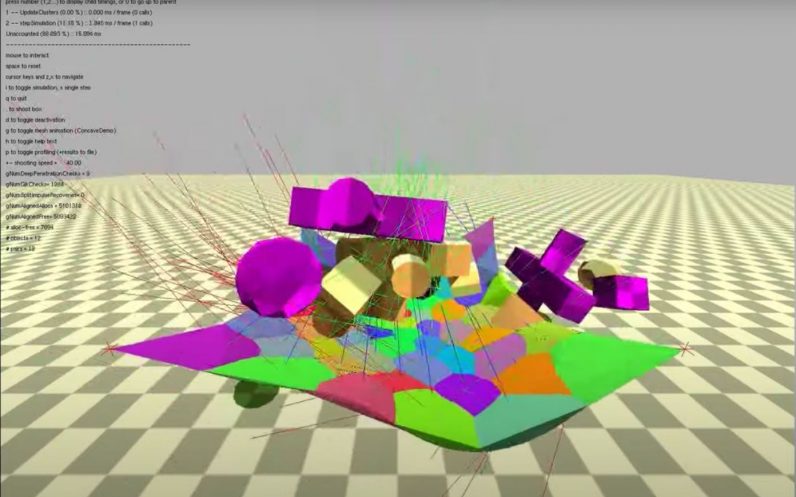
O mecanismo de física ajudará a IA a simular o mundo em pace actual e prever o que acontecerá no futuro. A simulação só precisa ser razoavelmente precisa e ajudar o agente a escolher um curso de ação promissor. Isso é semelhante a como a mente humana funciona também. Quando olhamos para uma imagem, como uma pilha de blocos, teremos uma ideia aproximada se ela resistirá à gravidade ou tombará. Ou se virmos um conjunto de blocos em uma mesa e nos perguntarem o que acontecerá se dermos um choque repentino na mesa, podemos prever aproximadamente quais blocos cairão.
Podemos não ser capazes de prever a trajetória exata de cada objeto, mas desenvolvemos uma ideia de alto nível do resultado. Quando combinado com um sistema de inferência simbólica, o simulador pode ser configurado para testar várias simulações possíveis em um ritmo muito rápido.
Aproximando cenas 3-D
Embora os simuladores sejam uma ótima ferramenta, um de seus grandes desafios é que não percebemos o mundo em termos de objetos tridimensionais. O sistema neuro-simbólico deve detectar a posição e orientação dos objetos na cena para criar uma representação 3-D aproximada do mundo.
Existem várias tentativas de usar o aprendizado profundo puro para detecção de posição e pose de objetos, mas sua precisão é baixa. Em um projeto conjunto, MIT e IBM criaram “Percepção de cena 3-D by means of programação probabilística” (3DP3), um sistema que unravel muitos dos erros em que os sistemas de aprendizado profundo puros se enquadram.
O 3DP3 pega uma imagem e tenta explicá-la através de volumes 3-D que capturam cada objeto. Ele alimenta os objetos em um gráfico de cena simbólico que especifica as relações de contato e suporte entre eles. E então tenta reconstruir a imagem unique e o mapa de profundidade para comparar com a verdade do terreno.

Pensando em soluções
Uma vez que o agente neuro-simbólico tenha um motor físico para modelar o mundo, ele deve ser capaz de desenvolver conceitos que o capacitem a agir de maneiras novas.
Por exemplo, pessoas (e às vezes animais) podem aprender a usar uma nova ferramenta para resolver um problema ou descobrir como reaproveitar um objeto conhecido para um novo objetivo (por exemplo, usar uma pedra em vez de um martelo para pregar um prego).
Para isso, Tenenbaum e seus colegas desenvolveram um simulador de física em que as pessoas teriam que usar objetos para resolver problemas de maneiras novas. O mesmo mecanismo foi usado para treinar modelos de IA para desenvolver conceitos abstratos sobre o uso de objetos.

“O importante é desenvolver estratégias de alto nível que possam ser transferidas em novas situações. É aqui que a abordagem simbólica se torna basic”, diz Tenenbaum.
Por exemplo, as pessoas podem usar conceitos abstratos como “martelo” e “catapulta” e usá-los para resolver diferentes problemas.
“As pessoas podem formar esses conceitos abstratos e transferi-los para situações próximas e distantes. Podemos modelar isso por meio de um programa que pode descrever esses conceitos simbolicamente”, diz Tenenbaum.
Em um de seus projetos, Tenenbaum e o sistema hello AI conseguiram analisar uma cena e usar um modelo probabilístico que produz um conjunto passo a passo de instruções simbólicas para resolver problemas de física. Por exemplo, para jogar um objeto colocado em um tabuleiro, o sistema foi capaz de descobrir que tinha que encontrar um objeto grande, colocá-lo bem acima da extremidade oposta do tabuleiro e soltá-lo para criar um efeito de catapulta.

Linguagem fisicamente fundamentada
Até agora, enquanto conversávamos muito sobre símbolos e conceitos, não havia menção à linguagem. Tenenbaum explicou em sua palestra que linguagem está profundamente enraizada no conhecimento tácito do senso comum que adquirimos antes de aprendermos a falar.
A física intuitiva e a teoria da mente estão ausentes dos atuais sistemas de processamento de linguagem herbal. Grandes modelos de linguagem, a abordagem atualmente in style para processamento e compreensão de linguagem herbal, tenta capturar padrões relevantes entre sequências de palavras examinando corpora de texto muito grandes. Embora esse método tenha produzido resultados impressionantes, ele também tem limites quando se trata de lidar com coisas que não estão representadas nas regularidades estatísticas de palavras e frases.
“Houve avanços tremendos em grandes modelos de linguagem, mas porque eles não têm uma base em física e teoria da mente, de certa forma eles são bastante limitados”, diz Tenenbaum. “E você pode ver isso em seus limites na compreensão de cenas simbólicas. Eles também não têm um senso de física. Os verbos geralmente se referem a estruturas causais. Você tem que ser capaz de capturar contrafactuais e eles têm que ser probabilísticos se você quiser fazer julgamentos.”

Os blocos de construção do bom senso
Até agora, muitas das abordagens bem-sucedidas em IA neurossimbólica fornecem aos modelos conhecimento prévio de física intuitiva, como consistência dimensional e invariância de tradução. Um dos principais desafios que permanecem é como projetar sistemas de IA que aprendam esses conceitos de física intuitiva como as crianças. O espaço de aprendizagem de motores de física é muito mais complicado do que o espaço de peso de redes neurais tradicionaiso que significa que ainda precisamos encontrar novas técnicas de aprendizagem.
Tenenbaum também discute a maneira como os humanos desenvolvem blocos de construção do conhecimento em um artigo intitulado “A criança como hacker.” No artigo, Tenenbaum e seus coautores usam a programação como um exemplo de como os humanos exploram soluções em diferentes dimensões, como precisão, eficiência, utilidade, modularidade, and so forth. Eles também discutem como os humanos coletam bits de informação, os desenvolvem em novos símbolos e conceitos, e então aprender a combiná-los para formar novos conceitos. Essas direções de pesquisa podem ajudar a decifrar o código do bom senso na IA neuro-simbólica.
“Queremos fornecer um roteiro de como alcançar a visão de pensar sobre o que torna o senso comum humano distinto e poderoso desde o início”, diz Tenenbaum. “De certa forma, é um dos sonhos mais antigos da IA que remonta à proposta unique de Alan Turing de inteligência como computação e a ideia de que podemos construir uma máquina que alcance inteligência de nível humano começando como um bebê e ensinando como uma criança. Isso tem sido inspirador para muitos de nós e o que estamos tentando fazer é criar os blocos de construção para isso.”
Este artigo foi originalmente publicado por Ben Dickson em TechTalks, uma publicação que examina as tendências em tecnologia, como elas afetam a maneira como vivemos e fazemos negócios e os problemas que elas resolvem. Mas também discutimos o lado maligno da tecnologia, as implicações mais sombrias da nova tecnologia e o que precisamos observar. Você pode ler o artigo unique aqui
[ad_2]
Fonte da Notícia




